In elementary school, Glenn Cameron was very aware of the challenges faced by his friend, who was missing a hand. Now Mr. Cameron has built a robotic hand that can be controlled by a human brain.
Mr. Cameron has always liked to build things and learn how things work. But he got more serious after he bought a remote-controlled car. He suddenly realized that he could combine his different skills to give the car new abilities. When he was done, the car could drive by itself without bumping into things.
(Source: Glenn Cameron, Bionic.dev.)
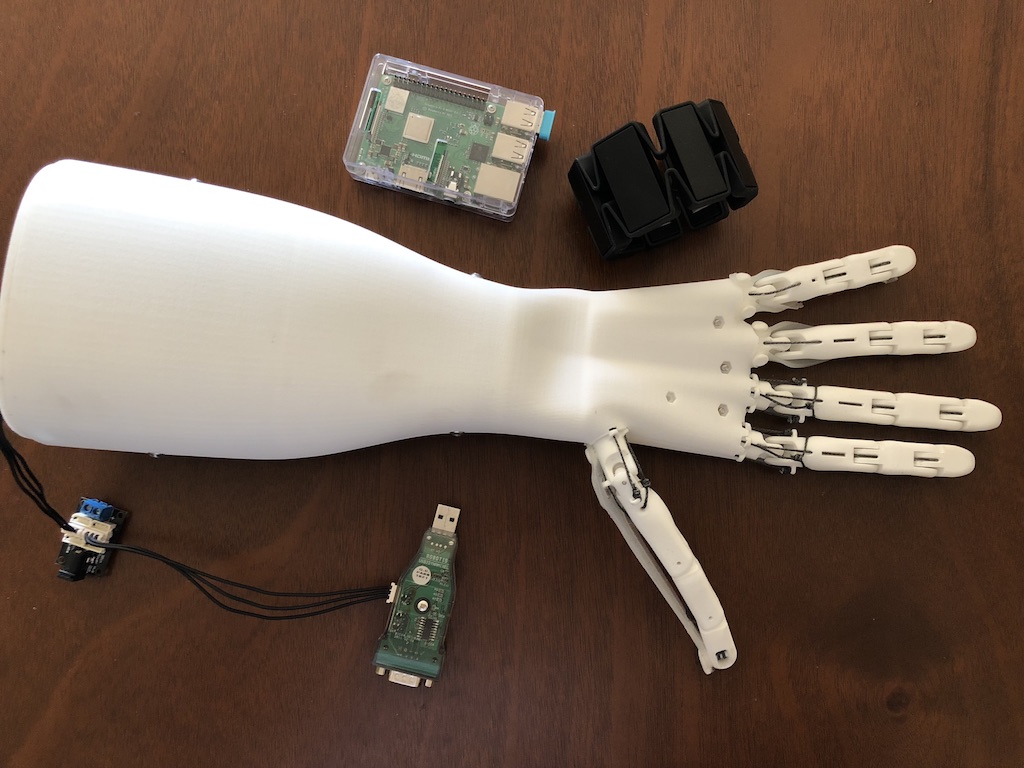
For his first robotic hand, Mr. Cameron 3D printed a hand from an online robot kit. 3D printing uses a special machine to “print” small objects out of many layers of plastic.
But Mr. Cameron realized the hand was too limited. He decided to build his own. It was quite a challenge, and took him almost a year, but his new version was better. It was also cheap, compared to many other robotic hand projects.

(Source: Glenn Cameron, Bionic.dev.)
Mr. Cameron says designing and building the hand is hard, and it can take a long time to get things right. He finds programming computers easier because when he makes a mistake, all he has to do is fix the mistake and try again.
Now Mr. Cameron is on his third version of the hand, which he calls “Dexi”. Each finger of the hand can move on its own. The strength and speed of the hand’s “muscles” can be controlled. The fingers stop closing when they come in contact with something, allowing the hand to shake hands, for example.

(Source: Glenn Cameron, Bionic.dev.)
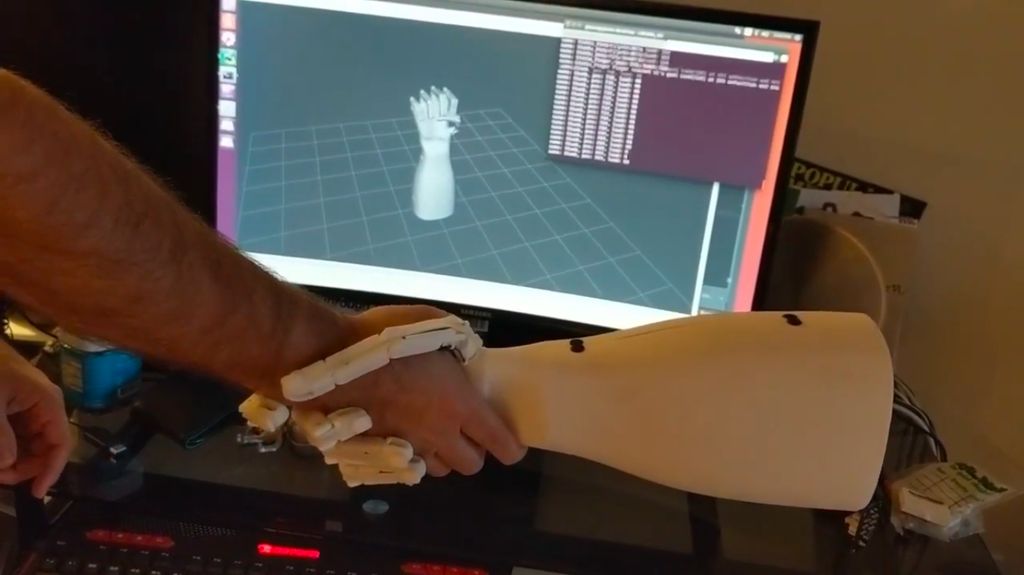
Mr. Cameron has designed the hand so it can be controlled by many different systems. He normally uses a computer, which lets him test different movements of the hand quickly and easily. He’s also created a digital version of the hand, which responds on a computer screen.
Perhaps the most interesting control system is the “brain interface”. A brain interface takes electrical signals from a human brain and sends them to a computer.

(Source: Glenn Cameron, Bionic.dev.)
Wearing a special headset, Mr. Cameron can open and close the robotic hand just by thinking. To make the hand close, he “sees” a fist in his head. It took about five hours to train the interface to close the hand. To open the hand, he thinks about the sound of a simple beep.
Now Mr. Cameron is working on a hand that can actually be used by a person who’s lost a hand. He says the new hand will be simpler, because there won’t be as much space. To make up for this, he’s adding a camera and trying to make the hand “smarter”. He wants to let users think of a task like “grab the ball” and have the hand do it automatically.
(Source: Glenn Cameron, Bionic.dev.)
Mr. Cameron encourages young people who think they might want to do something similar: “If you have something you want to do and you start working towards it, taking one little step at a time, sooner or later you’re going to get somewhere remarkable.”